Industriell automation och datorvisionsapplikationer
Industri 4.0-initiativet är orsaken till den dramatiska tillväxten i distributionen av ett brett utbud av industriella internet of things (IIoT)-enheter som används för industriella automationsapplikationer. IIoT -enheter används för att övervaka och kontrollera tillgångar i produktionsanläggningar och används även för att mäta och analysera utrustningsförhållanden som en del av en underhåll, reparation och översyn.
Sensorer är viktiga, allt från temperaturmätningar till vätsketrycksensorer och kameror för applikationer för synbehandling. Sensorer används också för att övervaka vibrationer med hjälp av neurologiska algoritmer för ljudbearbetning av data som erhållits från digitala mikrofoner. Vision är också en avgörande avkänningsteknik, som används till exempel för att säkerställa att flasketiketter sitter korrekt på en produktionslinje för tappning, eller i funktionella säkerhetsapplikationer för att isolera utrustning om produktionspersonal skulle komma in i ett osäkert område.
Arkitektur för en visionbehandlingslösning
I alla moderna fabriker kan datorbaserad visionbehandling användas i en mängd olika applikationer. Datorsyn är beroende av att en eller flera videokameror är anslutna till ett datorsystem. Uppgiftens karaktär kommer att avgöra komplexiteten i den inblandade behandlingen och de beräknade resurser som krävs. Till exempel kan en applikation som godkänner eller avvisar flaskor baserat på hur noggrant en etikett har satts kanske inte kräver flera kameror och intensiva beräkningsresurser. En algoritm som detekterar etikettens kanter inom ett fördefinierat område på flaskan är relativt enkelt med hjälp av mjukvarubaserade Kalman-filter.
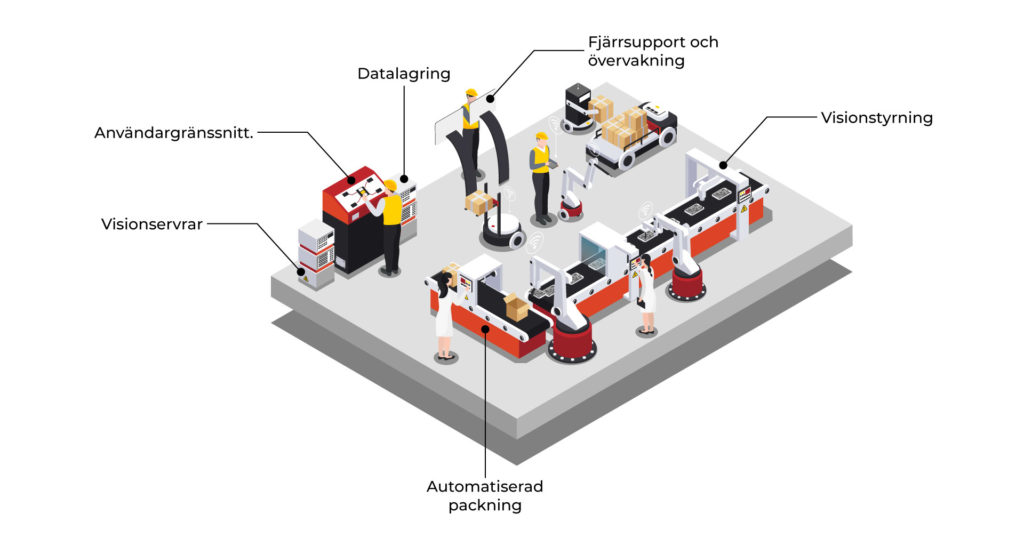
Men en applikation som behöver skilja armarna hos en hydraulisk pressoperatör från metallpanelerna som bearbetas och själva utrustningen är mer involverad. Denna applikation kräver ett neuralt maskininlärningsnätverk och kan kräva flera olika kameravinklar för att uppfylla funktionella säkerhetskrav. Det konvolutionella neurala nätverket är bäst lämpat för visionbaserade objektdetekteringsuppgifter och måste tränas före distribution. När det väl har tränats kallas användningen av ett neuralt nätverk för inferens. Utbildningsprocessen undersöker hundratals korrekta och felaktiga bilder för att identifiera och extrahera funktioner för att underlätta klassificering. Se ett exempel på arkitekturen för en visionsbehandlingslösning Figur 1.
Ur ett applikationsperspektiv finns det flera praktiska överväganden som ett utvecklingsteam bör granska. Dessa inkluderar typen av objekt som ska detekteras, förhållandena för omgivande ljus i detekteringszonen, hur snabbt objekten passerar inom kamerans vy, hastigheten på objektidentifiering som krävs och om det krävs flera kameravinklar för att kunna utföra uppgiften på ett tillförlitligt sätt.
Driftmiljön behöver också utredas; Till exempel krävs inträngningsskydd för kameran och styrelektroniken för en applikation som utsätts för damm och fukt. Vibrationer och stötar kan också störa bildkvaliteten och göra detekteringen mindre tillförlitlig.
Tidpunkten för objekt- eller funktionsdetektering är kritisk. Produktionslinjer körs ofta med hög hastighet för att bibehålla fabrikens effektivitet och uppfylla genomströmningsmål. I exemplet med en enkel tappningsanläggning ovan måste datorvisionsapplikationen fånga bilden exakt, bearbeta den, bestämma etikettstatus i tid för aktionen godkänn eller avvisa på den identifierade flaskan.
Vi presenterar Arduino Pro Portenta och Portenta Vision Shield
Den nylig lanserte Arduino Pro Portenta-plattformen er en ideell mikrokontrollerplattform for
Den nyligen introducerade Arduino Pro Portenta-plattformen är en idealisk mikrokontrollerplattform för att prototypa en industriell maskinsynlösning.
Ursprungligen utvecklad som en pedagogisk prototypplattform för hobbyister och tillverkare, har Arduino-familjen mikrokontrollerutvecklingskort fortsatt att utvecklas för att tillgodose de krävande behoven hos innovatörer och tillverkare av industriutrustning.
Arduino är orsak till en startad karriär för många unga elektronikstudenter, och är ett prisvärt och mycket mångsidigt inbyggt system för innovatörer för att prototypa nya produktidéer. Arduinos öppna källkodsmetod, tillsammans med dess växande gemenskap av tilläggskort och omfattande mjukvarustöd från hela elektronikbranschen, har etablerat Arduino som ett förstaval av inbäddad plattform för många nya produktdesigner.
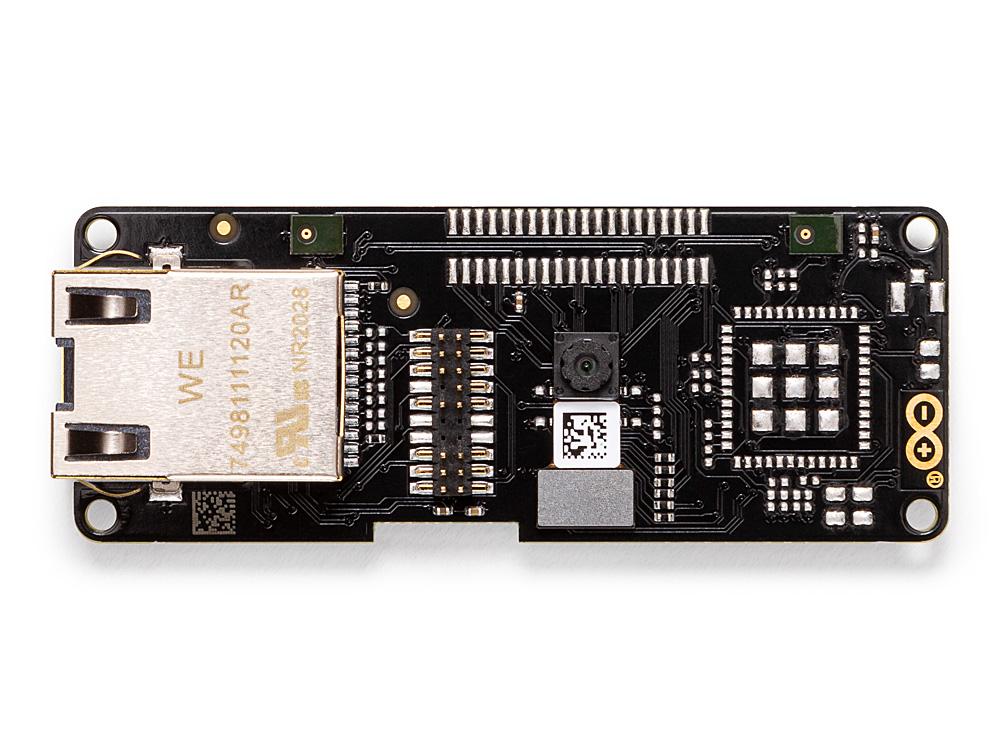
Nästa steg i Arduinos resa började nyligen med Arduino Pro-serien kort och moduler riktade mot den industriella marknaden. Arduino Portenta H7 med dubbla kärnor är den första i Pro-kortserien som uppfyller kraven från industriella och kommersiella applikationer. Portenta H7 är välutrustad för industriella maskinvisionsapplikationer. Den är tillverkad i det populära Arduino MKR-kortformatet som ger tillgång till alla befintliga tillbehörskort och sköldar (shields) från Arduino. Portenta Vision-skölden, tillgänglig med antingen trådbundet Ethernet- eller LoRa-gränssnitt, är idealiskt för industriella datorvisionsapplikationer.
Arduino Portenta H7 har en STMicro STM32H747XI lav-effekt mikrokontroller utstyrt med
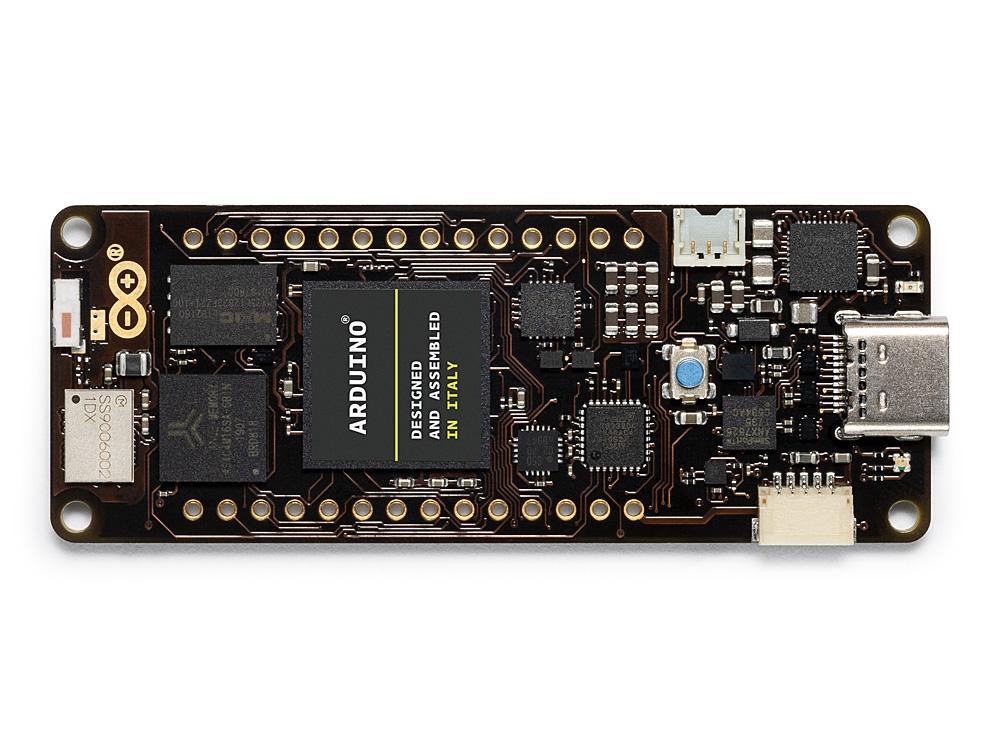
Arduino Portenta H7 har en STMicro STM32H747XI lågeffekt-mikrokontroller utrustad med kärnorna Arm Cortex-M7 och Arm Cortex-M4. Båda kärnorna har floating-point-enheter (FPU), M7 FPU ger beräkningar med dubbel precision. M7-kärnan kan arbeta upp till 480 MHz och M4-kärnan upp till 240 MHz. M4-kärnan har också en integrerad adaptiv realtidsaccelerator, GPU som är utformad speciellt för att köra neurala nätverksalgoritmer. Strömhantering hos H7 aktiveras genom att använda tre strömdomäner som antingen kan styras av/på av applikationen eller med ”clock gating”. En enkel 5 VDC-källa driver Portenta, och när den är i viloläge sleep-mode med RTC aktiverad är strömförbrukningen 2.9 uA typ. En inbyggd PMIC ger möjlighet att ladda ett Li-Po/Li-Ion-batteri.
Kortets perifera gränssnittsfunktioner inkluderar flera I2C-, USART-, SPI- och CAN-portar, ett 8-bitars kameragränssnitt och en MIPI DSI-värd. Analogt till digitalt stöd innehåller två 12-bitars DAC och tre 16-bitars ADC.
Arduino Portenta Vision-skölden ansluts till Portenta H7 via högdensitetskontakter. Den integrerade Himan HM-01B0-kameran med mycket låg strömförbrukning ger QQVGA- och QVGA-utgångar med bildhastighet från 15 fps till 120 fps. Två MEMS-mikrofoner finns också integrerade i skölden. De dubbla kärnfunktionerna i Portenta H7 gör det möjligt att köra MicroPython-kod och Arduino C-skisser separat på kärnorna.
Programvarusupport snabbar upp distributionen av datorvision
Portenta H7 och Portenta Vision-skölden stöds fullt ut av en förbättrad version av den populära Arduino IDE. Dessutom finns även en molnbaserad redigerare samt en redigerare för kommandoradsgränssnitt. Komplett kamera- och mikrofonbiblioteksstöd är tillgängligt via Arduino 2 IDE, och Arduinos webbplats har flera olika självstudier.
Open-source machine vision learning framework, OpenMV och OpenMV IDE stöder Portentas kort. OpenMV är baserat på Python och tillåter utveckling av MicroPython-baserade visionapplikationer på Portenta H7. Till exempel är Arduinos webbplats värd för en handledning för klassificering av maskinsyn med OpenMV och Edge Impulse.
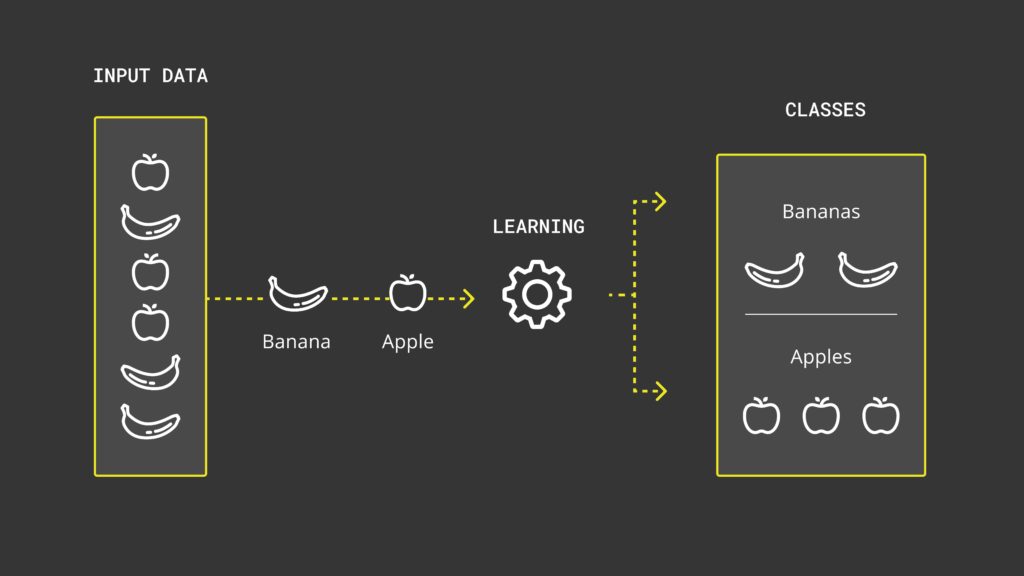
Det neurala nätverket använder bildklassificeringstekniker för att upptäcka äpplen och bananer, men involverade koncept och processen som följs kan likaså gälla en flaskmärkningstillämpning.
Arduino Pro Portenta – spårar snabbt din industriella datorvisionsdesign
För embedded-utvecklare och industriella applikationsdesigners kan det vara skrämmande att komma igång med ett maskinvisionsprojekt. Att ta tag i begreppet, en neural nätverksalgoritm, är en nog så stor utmaning i sig innan man väljer en lämplig prototypplattform. Arduino Portenta H7 och Portenta Vision-skölden förenklar dock avsevärt utvecklingsprocessen. Dessutom har utmaningarna med att utveckla en maskinvisionsapplikation blivit långt enklare, med stöd från branschbeprövade och välunderstödda ramar för maskininlärning, bibliotek och självstudier.
Arduino Portenta H7 Mirocontroller Board
Arduino Portenta Vision Shield