



Moderne robotikk trenger strøm, styring og aktuering for å fungere, og derfor er det så viktig å finne den optimale strømforsyningen, aktuatoren, motoren og driveren som behøves tidlig i designprosessen.
Før man tar valget er det viktig å vite hvilken type robot man skal utvikle og hva denne skal brukes til. I produksjon fins det mange ulike roboter, som cartesian, SCARA, sylindrisk, delta, polar, gantry og robotarmer. Disse kan utføre oppgaver som montering, sveising, maskinbetjening, pakking, maling, plukk og plasser, inspeksjon og testing.
Type strømforsyning er det viktigste hensynet, spesielt når man tenker på pålitelighet, størrelse, vekt og livssyklus. For optimalisert bevegelse må robotutviklere også tenke på motorer og aktuatorer, og hvordan man best kontrollerer disse.
Batterier
Batterier er den vanligste strømforysningen og hvilket type batteri man trenger er avhengig av sikkerhet, livssyklus, vekt og pris.
Man finner både primær- (ikke ladbare) og sekundærbatterier (ladbare) i industrielle roboter. Selv om primærbatterier må byttes ut, har de ofte større effekt i forhold til størrelsen, noe som gjør at de er ideelle for applikasjoner med lavt strømforbruk. Men som oftest foretrekkes oppladbare batterier.
Historisk sett er NiCd (nikkel-kadmium) og blybatterier de vanligste typene. Ventilregulerte batterier, såkalte gelébatterier, har også vært vanlig og de kan forsyne strøm på opptil 40 wh/kg. Andre batterier inkluderer NiMH-batterier (nikkelmetallhybrid), sølv-sink og litium-ion.

I dag er litium populært blant robotutviklere. Ytelsen, holdbarheten og skalerbarheten til litium-ion-batterier er populære i industrielle roboter og disse batteriene kan skaleres til å møte de fleste automasjonsoppgaver. En av de største fordelen er hvor lette de er. Som et grunnstoff er litium spesielt reaktivt, noe som betyr at det kan lagre en stor mendge energi. Vanligvis kan man lagre 150 Wh i et batteri på 1 kg. Dette er gode nyheter sammenlignet med et NiMH-batteri, som kan lagre mellom 60 til 100 Wh.
Det er også verdt å nevne sveiseroboter, som man ofte finner i bilsektoren. Den samme strømkilden som forsyner sveiseapparatet brukes også for å forsyne robotens elektroniske drivere og bevegelseskomponenter, og for denne type bruk er invertere populære. Den nyeste inverterknologien justerer automatisk inngangsstrømmen samtidig som den ivaretar en konstant utgangseffekt, og har overspenningsvern slik at ytelsen ikke påvirkes av annet utstyr som trenger mer strøm.
Det er tydelig at batteriet er viktig når det kommer til valg av robottype, og form vil være grunnleggende her. Vekt er også en annen viktig faktor og er avhengig av om roboten vil være stasjonær eller bærbar.
Robusthet og kapasitet vil være nøkkelfaktorer i når man velger langtlevende batterier.
Solceller
Selv om bruken av solkraft har vært en fordel for mange teknikere og ingeniører, brukes det fortsatt lite i industriell robotikk. BAEM-roboter (Biology, Electronic, Aesthetics and Mechanics) som automatiserte gressklippere eller støvsugere, bruker solcelleteknologi. Solcellen har en kretsstruktur som lader en kondensator som setter spenningsnivået før den spres gjennom motoren.
Men denne teknologien er fortsatt ikke levedyktig for bruk i kommersielle roboter. Det er mange grunner til dette, men hovedsaklig er det fordi strømtettheten (Wp/m2) er for lav.
Brenselceller
Brencelcelleteknologi kan erstatte konvensjonelle batterier i framtiden. De kombinerer hydrogen, metanol, eller akhohol, med oksygen for å generere elektrisitet. Det er for tiden dyrt å produsere disse, men dette kan endres ettersom brenselceller blir mer kommersielle.
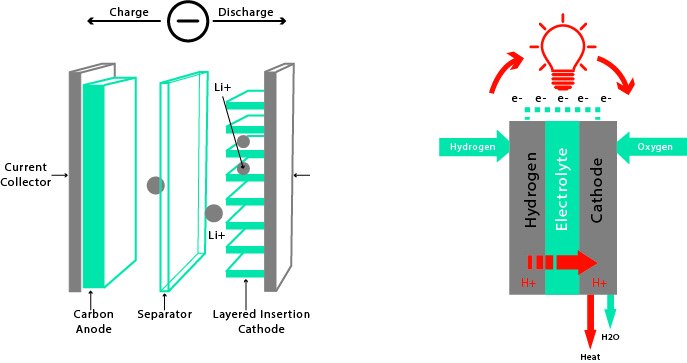
Brenselceller kan hente elektrisitet fra hydrokarbonkilder med en effektivite på opptil 75%. En typisk konfigurasjon har to elektroder på hver side av en ledende elektrolytt. Strøm genereres gjennom et konsept som ligner på forbrenning av drivstoff, hvor protoner går gjennom membraner og elektroner tvinges til å gå fra anode til katode via den elektriske kretsen. Brenselceller kan bli enda mer effektive hvis man også utnytter spillvarmen.
Aktuatorer
Når man har valgt strømkilde, kan man fokusere på aktuatorer, og lineære og roterende bevegelser.
Trinnmotorer
Trinnmotorer er vanlig å finne i applikasjoner hvor kostnad er viktig, som i vanlige roboter med plukk-og-plasser-funksjoner. Høynøyaktig posisjonskontroll er en av hovedfordelenen og er grunnen til at brukes i blant annet 3D-printere og CNC fresemaskiner. Dette er fordi trinnmtorerer er utviklet for å ha et høyt holdemoment, noe som gjør det mulig å gå trinnvis til neste posisjon. Dette vil være nyttig i applikasjoner som trenger å kontrollere rotasjonsvinkel, hastighet, posisjon og synkronisering. Fordi trinnmotorer leverer maksimummoment ved lave hastigheter er de et godt valg for applikasjoner som trenger lave hastigheter og presisjon.
Trinnmotorer var populære i tidlig robotikk, men har ikke vært like mye brukt i moderne tid. Noen av grunnene til dette er effektivitet, behov for kodere eller grensebrytere for å etablere referansepoissjon, og det faktum at man kan gå glipp av trinn hvis de overbelastes. Istedenfor er mer sannsylig at man tar i bruk børsteløse servomotorer.
Servomotorer
Selv om mange av de første robotene brukte DC-servomotorer (de hadde rimelig effektutgang med høy hastighet og posisjonskontroll), bruker de fleste industrielle roboter i dag børsetløse AC-servomotorer. Slike motorer har høyere effektutgang og stille drift, og mangelen på børste betyr at disse høymomentenhetene er svært pålitelige og behøver kun minimalt vedlikehold.
Servomoterer har en grunnleggende fordel forde de har vinklet presisjon, og roterer kun så mye som de trenger før de venter på neste signal.
Hovedforskjellen mellom digitale og analoge servomotorer er signalet og hvordan dette behandles fra mottakeren og hvordan motoren bruker denne informasjonen for å sende mer strøm. Analoge servoer kontrollerer motorens hastighet ved å gi et på/av-signal, mens digitale servoer har små mikroprosesser som analyserer og mottar signaler og behandler disse til høyfrekvens spenningspulser.
I motsetning til analoge servomotorer, som sender ut 50 pulser per sekund, kan digitale servoer sende opptil 300 pulser per sekund. Pulsene er kortere i lengde, men motoren akselereres likevel fortere og har konstant moment. Hvor mye strøm som sendes til motoren kan også justeres for optimalisert ytelse og presisjon.
Hva bør man tenke på ved valg av motor?
For å velge den mest optimale motoren når man utvikler en robot må man også ta hensyn til moment, hastighet, presisjon, spenning, pris og størrelse.
I en robot sendes momentet til et hjul eller en aktuator som så beveger seg i en rotasjonell eller linær bevegelse. For å beregne ønsket moment må ingeniører bestemme massen av maksimum belastning, samt systemets statiske, dynamiske og rullende friksjon.
For roboter på hjul er det viktig å spesifisere hastigheten som hjulene vil ha. Hvis man øker hastigheten vil det oftest gå utover presisjon. For å utvikle nøyaktige robotarmer er servomotorer populære fordi de har intern posisjonsregulering og har lavere hastigheter, noe som gjør at de er svært pesise.
En annen viktig ting å tenke på er driftsspenning. Før man velger hvilke batteri man skal bruke er det best å bestemme nominell spenning når motoren er i drift. Jo høyere spenning, jo raskere er motoren. På databladet brukes ‘konstant spenning’ for å bestemme hastighet per volt.
Hydrauliske og pneumatiske alternativer
Hydraulikk er vanlig i tidlig robotikk. Det er en stiv og kontrollerbar teknologi sammenlignet med pneumatikk, og hadde større effektivitet enn de elektriske driverne på den tiden. Hydraulikk gjør også at man kan skape et større reduksjonsforhold.
Den største ulempen med denne teknologien er den relative trege driftshastigheten. Dette foregår under høyt trykk, noe som betyr at lekkasjer lettere oppstår.
I pneumatikk bruker systemer for plukk-og-plassering trykkluft, noe som gjør dette til et rimelig alternativ, men likevel vanskelig å kontrollere. Trykkluften introduserer også en såkalt dead time-dynamikk noe som gjør kontroll vanskelig.
Pneumatikk brukes også i slutteffektorer fordi pneumatiske sylindre kan levere større kraft og er et godt valg for større gripeutstyr. Noen roboter kan også bevege seg ved bruk av en størmkilde som består av en innebygd beholder med trykkluft. Dette er likevel svært sjeldent. Pneumatikk er ikke like utbredt fordi man kan kun produsere små og enkle bevegelser som går fram og tilbake.
Servo eller trinn?
Når valget står mellom en servomotor og en trinnmotor er det et spørsmål om kompleksitet vs. styring. En trinnmotor har enklere konfigurasjon fordi den ikke trenger en koder. Dette gjør at de er enklere å kontrollere, men kun hvis roboten ikke har like strenge ytelseskrav. Ønsker man å presse den til det ytterste vil det ikke lenger være like enkelt å kontrollere den.
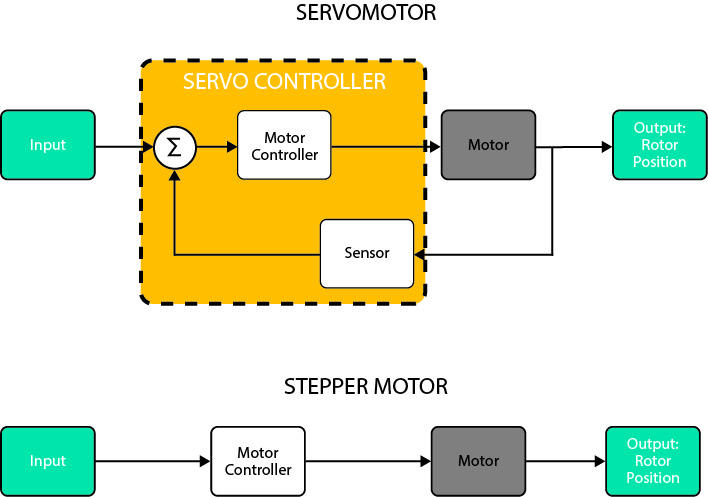
Trinnmotorer, på en annen side, kan kontrolleres i et åpent sløyfe-system. Dette betyr at det er ikke er et krav til tilbakemelding angående posisjon, noe som gjør at man ikke lenger behøver kodere eller resolvere, og disse er ofte dyre. For å vite posisjonen trenger man kun å følge med på de inngående trinnpulsene.
Servomotorer sender hastighetskommandoer til en driverforsterker, som igjen forsyner servomotoren. En tilbakemeldingsenhet (som en koder) gir informasjon om servomotorens posisjon og hastighet. For å bryte dette ned enda mer, kontrolleres enheten av et tilbakemeldingssignal som genereres ved å sammenligne utgangssignal og referanseinngangssignal.
Servomotoren kan operere med en spesifikk bevegelesprofil som kan programmeres i kontrolleren. Servomotorer kontrolleres med et prinsipp vi kaller pulsbreddemodellering (PWM), hvor rotasjonsvinkelen bestemmes av varigheten av den påførte pulsen.




