



Effekten, kontrollen och styrningen är avgörande för moderna robotars rörelser. Därför är det viktigt att redan tidigt i designprocessen ringa in hur roboten bäst drivs och styrs och vilka motorer och drivare som är optimala.
Till att börja med behöver man fundera på typ av robot och hur den ska användas. Det finns mängder av olika typer av robotar inom industrin, till exempel linjära, SCARA-, cylindriska, delta- och sfäriska robotar och robotar med portalkranar och armar med leder. De kan bland annat användas till att montera, svetsa, underhålla maskiner, förpacka, måla, plocka och placera, undersöka och testa, för att bara nämna några saker.
Det är också viktigt att fundera på hur den ska drivas, utifrån tillförlitlighet, storlek, vikt och livslängd. Robottillverkare behöver också tänka på vilka motorer och ställdon som passar bäst och hur de bäst styrs för optimala rörelser.
Batterier
Batterier är den vanligaste källan till elektrisk ström och vilken typ av batteri man väljer beror bland annat på säkerhet, livslängd, vikt och kostnad.
Både primärbatterier (engångsbatterier) och sekundärbatterier (laddningsbara) används i industrirobotar. Primärbatterier har förstås nackdelen att de behöver bytas ut, men de har ofta mer kapacitet i förhållande till sin storlek, vilket gör att de passar bra för vissa användningsområden som inte drar så mycket batteri. Trots det är det oftare bättre med laddningsbara batterier.
De vanligaste laddningsbara batterierna till robotar har traditionellt varit nickel-kadmiumackumulatorer (NiCd) och blyackumulatorer. Vidare har även blybatterier med gel ibland använts och de kan erbjuda upp till 40 Wh/kg. Exempel på andra sekundärbatterier är nickelmetallhydridbatterier (NiMH), silverzinkbatterier och litiumjonbatterier.

Det mest populära valet för dagens robotutvecklare är dock litiumtekniker. Prestandan, hållbarheten och skalbarheten som litiumjonbatterier erbjuder har definitivt bidragit till dess popularitet i industrirobotar. Litiumbatteribanker kan anpassas till de flesta automationsområden. En av de många andra fördelarna med litiumjontekniker är den lätta vikten. Litiumet i sig är dessutom extremt reaktivt, vilket gör att det har förmågan att lagra mycket energi. Batterierna brukar kunna lagra runt 150 Wh per 1 kg batteri. Det är en hel del mer än om man jämför med ett NiMH-batteripack, som kan lagra mellan 60 till 100 Wh.
Det kan vara intressant att titta på svetsrobotar, som vi ofta hittar inom fordonsindustrin. Här kan samma strömkälla som driver svetsen användas till robotens elektroniska enheter och komponenter för rörelsekontroll. Till det har växelriktare visat sig populära. Några av de senaste växelriktarteknikerna justerar automatiskt ineffekten samtidigt som uteffekten är konstant. De blockerar även strömrusning för att se till att prestandan inte påverkas av att flera enheter som kräver mycket ström används samtidigt.
Batteriernas form får så klart också stort inflytande på valet av batteri och typ av robot. Formen avgör vilka batterityper som ska ingå i beslutsprocessen. På samma sätt är vikten avgörande och kan bero på om roboten ska vara mobil eller stå fast.
En annan konkurrenskraftig fördel kan vara hur länge roboten kan köras innan den kräver extra kostnader. Hållbarheten och kapaciteten är alltså viktiga aspekter att ta hänsyn till när man väger in livslängden i valet av batteri.
Solceller
Solkraften har bidragit med en rad fördelar inom många delar av maskintekniken, men har fortfarande inte riktigt fått fäste i industrirobotar. Vissa BEAM-robotar (biologi, elektronik, estetik och mekanik), till exempel robotgräsklippare och robotdammsugare, använder solcellsteknik. Det brukar fungera så att solceller genom en lämplig strömkrets laddar en kondensator till en viss spänning som sedan laddas ur genom motorn eller motorerna.
En uppskalning av den här tekniken för att använda den i industrirobotar på kommersiell nivå har fortfarande inte blivit verklighet. Det finns många anledningar till att utvecklingen går långsamt, men det beror främst på att solceller har en relativt låg energitäthet (Wp/m2) som inte räcker till de flesta moderna industrirobotar.
Bränsleceller
Det är mycket troligare att bränslecellsteknik ersätter traditionella batterier i industrirobotar. Med den kan man generera elektricitet genom att kombinera väte, metanol eller vanlig alkohol med syre. Idag är kostnaden det största hindret, men det skulle kunna förändras om bränsleceller blir vanligare på konsumentmarknaden.
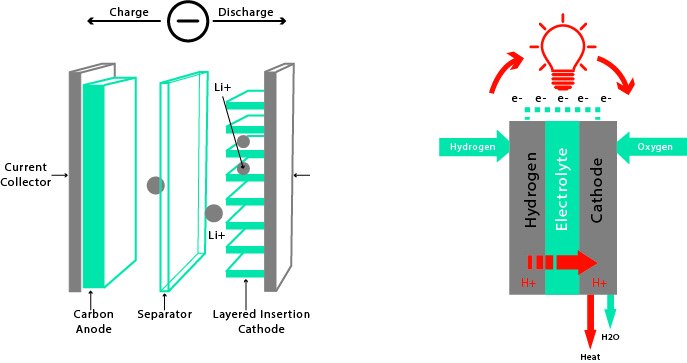
Bränsleceller ger energi genom att generera ström från en kolvätekälla med upp till 75 % effektivitet. Det brukar fungera så att två elektroder placeras på varsin sida om en ledande elektrolyt. Strömmen genereras ungefär på samma sätt som vid bränsleförbränning. Protoner passerar genom membranen och elektroner tvingas passera från anod till katod via den elektriska kretsen. Bränslecellernas verkningsgrad kan dessutom förbättras ytterligare om man tar vara på värmen som släpps ut.
Ställdon
När man har bestämt hur roboten ska drivas är det dags att titta på de ställdon och motorer som behövs till robotens linjära och roterande rörelser.
Stegmotorer
Stegmotorer finns vanligtvis inom områden där kostnaden är en viktig faktor, till exempel i vanliga plockrobotar. Bland de viktigaste fördelarna är att man kan styra positionen med hög precision. Därför används de ofta i till exempel 3D-skrivare och CNC-fräsmaskiner. Anledningen till det är att stegmotorer är särskilt utformade för att erbjuda ett högt hållmoment som gör att de stegvis kan röra sig uppåt till nästa position. De kan med fördel användas när man behöver kunna styra rotationens vinkel, hastighet, position och synkronisering. Stegmotorer är också ett bra val när man behöver en robot som jobbar långsamt och med hög precision eftersom de erbjuder maximalt vridmoment även vid låga hastigheter.
Det var vanligt med stegmotorer i de tidiga robotarna, men de har blivit mindre vanliga på senare år. Några av anledningarna till det är verkningsgraden, behovet av pulsgivare eller gränslägesbrytare för att fastställa referenspunkter och risken för missade steg vid överbelastning. Det är samtidigt troligt att det kommer mer avancerad teknik för borstlösa servomotorer för växelström.
Servomotorer
Många av de tidiga robotarna använde servomotorer för likström (eftersom de erbjuder relativt bra uteffekt samtidigt som de erbjuder bra hastigheter och positionsstyrning), men numera har de flesta nya industrirobotar borstlösa servomotorer för växelström. Den här typen av motorer har den fördelen att de har en högre uteffekt och praktiskt taget tyst drift. Tack vare att de saknar borstar är de här enheterna med högt vridmoment även mycket tillförlitliga och kräver i stort sett inget underhåll.
Servomotorer har dessutom den naturliga fördelen att de erbjuder en hög grad av precision för vinklar och roterar bara så mycket som de är inställda för tills nästa signal kommer.
Den största skillnaden mellan digitala och analoga servomotorer är signalen och hur den bearbetas från mottagaren till servon och hur servon använder informationen för att ge ström till motorn. Analoga servomotorer styr motorns hastighet genom att skicka signaler till motorn om att slå på och stänga av spänningen, medan digitala servomotorer har en liten mikroprocessor som analyserar mottagarsignalerna och bearbetar dem till spänningspulser med hög frekvens till motorn.
Fördelen med digitala servomotorer är att de kan skicka upp till 300 pulser per sekund, till skillnad från analoga servomotorer, som skickar ut 50 pulser per sekund. Pulserna i den digitala servon är kortare, men tack vare att de är så många accelererar motorn snabbare och har ett konstant vridmoment. Med digitala servomotorer kan man även ställa in effekten som skickas till motorn för att optimera prestanda och precision.
Verkningsgrad, storlek, precision, tillförlitlighet, hastighet och vridmoment
Ett av de viktigaste stegen i ett robotprojekt är valet av motor. Man behöver fundera på vilken som passar bäst utifrån vridmoment, hastighet, precision, spänning, kostnad och form.
I en robot förmedlas motorns vridmoment oftast till ett hjul eller ställdon som sedan sätter igång robotens roterande eller linjära rörelse. För att avgöra vilket vridmoment som behövs måste utvecklarna fastställa den planerade maximala lastens massa och systemets statiska och dynamiska friktion samt rullmotstånd.
När det gäller robotar med hjul är det viktigt att specificera hur snabbt hjulen måste snurra. Man måste oftast tumma på precisionen ju snabbare hjulen snurrar. Med servomotorer kan man styra positionen väldigt exakt eftersom det går att reglera positionen inifrån och de kan köras långsammare. Det är kort sagt den främsta anledningen till att servomotorer är det vanligaste valet för att uppnå den precision man behöver för robotarmarna.
En annan viktig faktor är spänningen vid drift. Det är bäst att man fastställer den nominella spänningen när motorn är i drift innan man bestämmer vilka batteripack som ska användas i projektet. Ju högre spänning brukar betyda desto högre hastighet för motorn. Konstantspänningen i motorns specifikationer kan användas för att avgöra hastigheten per volt.
Hydrauliska och pneumatiska alternativ
Hydrauliska system var ganska vanliga i de tidiga robotarna eftersom den här tekniken är mer stabil och går att styra bättre i jämförelse med pneumatiska system. De kunde även ge högre effekt än den drivelektronik som fanns. Hydrauliska system erbjuder även möjligheten att skapa ett omfattande reduktionsförhållande.
Den främsta nackdelen med hydrauliska system är att de är jämförelsevis långsamma och det höga trycket kan göra att läckor blir problematiska.
Pneumatik kan vara kostnadseffektivt och många enkla plocksystem drivs med tryckluft, men nackdelen är att systemet är svårt att styra. I grund och botten handlar det om att komprimeringen av luften skapar viss ”dödtid” i systemet som gör det svårare att styra.
Pneumatik används även i änden av armen på en rad industrirobotar. Pneumatiska cylindrar erbjuder enorm kraft och är ofta ett bra val för stora gripdon. Det är också möjligt, även om det inte är så vanligt, för vissa robotar att använda pneumatiska cylindrar till att förflytta sig med hjälp av en inbyggd flaska med tryckluft som energikälla. Något som tenderar att begränsa en ökad användning av pneumatik är att tekniken bara kan göra relativt små och enkla rörelser fram och tillbaka.
Välja rätt tekniker för att styra motorn
Valet mellan en servomotor eller stegmotor handlar egentligen om en kompromiss mellan komplexitet och exakt styrning. En stegmotor har en enklare utformning eftersom den, till skillnad från servomotorn, inte behöver någon pulsgivare. Det gör att stegmotorer är enklare att styra, men bara om kraven på roboten är låga. Robotutvecklare som vill köra stegmotorer på maxkapacitet kommer snart att märka att de blir mycket svårare att styra.
En av fördelarna med stegmotorer är att de kan styras utan återkoppling. Det betyder att det inte behövs någon återkoppling för positionen, så att man slipper behovet av pulsgivare eller resolvers och de kostnader de medför. Positionen bestäms helt enkelt av de inställda stegen.
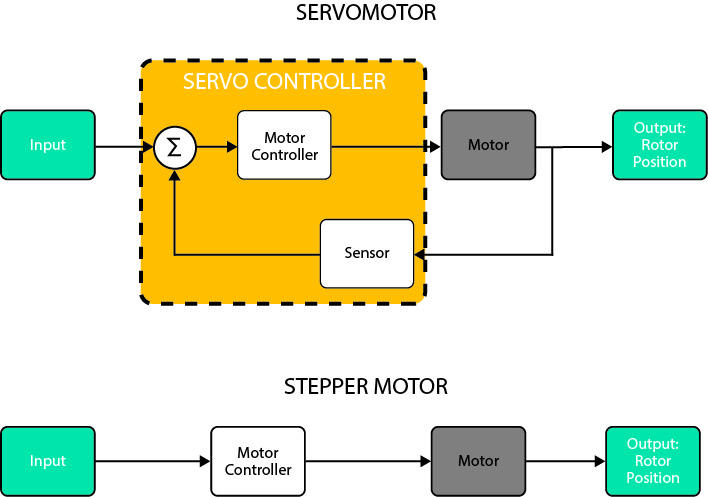
Servomotorer används i återkopplade styrsystem med en digital styrenhet som skickar hastighetskommandon till en förstärkare, som sedan skickar signaler till servomotorn. En feedbackenhet (pulsgivare eller resolver) ger information om servomotorns position och hastighet. Mer i detalj betyder det att enheten styrs av en feedbacksignal som skapas genom en jämförelse av utsignaler och givna insignaler.
Tack vare det återkopplade styrsystemet kan en servomotor drivas med en specifik rörelseprofil som programmeras i styrsystemet. Servomotorer kan styras med en princip som kallas pulsbreddsmodulering (PWM) med den rotationsvinkel som bestäms av längden på den angivna pulsen.




